Vehicle safety, vehicle "intelligence" and driving comfort are ever-increasing demands. With the ability to drive the wheels separately, the extreme acceleration of the electric drive, and the weight of the traction battery, engineers face many new challenges when tuning the handling of electric vehicles. The electrification of the powertrain will make it possible to intervene more quickly at the steering wheel and allows the chassis and wheels to be set to different modes, such as "Sport" or "Eco".
Definition and principle of torque vectoring
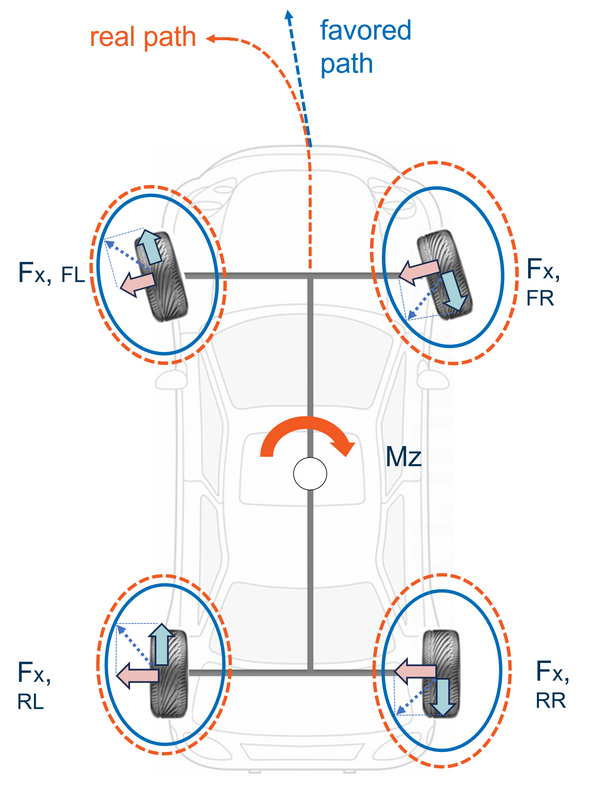
“Torque vectoring" is a technology that is increasingly being used in modern vehicle architectures to tune the driving behavior of an EV. Here, the driving and braking torques applied to the individual wheels are controlled differently. A prerequisite and challenge for the use of torque vectoring technologies in vehicle development are vehicle dynamics tests with precise and synchronous data acquisition. Vehicle dynamics deal with the lateral dynamics of the vehicle, which mainly refers to driving stability, lateral slip, yaw, and roll. It is further divided into longitudinal dynamics and vertical dynamics, which include driving, braking, and ride comfort. Driving slip and braking slip are studied at the wheels in the longitudinal direction of the vehicle, which can also improve driving and braking efficiency.
The focus here is on optimizing the torque distribution of the wheels. By electronically tuning the vehicle, a torque is applied to correct the driving line. For example, a vehicle that is oversteering at the limit can be brought back to the desired line by applying more drive torque to the inside wheels than to the outside wheels. This type of intervention can be used to adjust the vehicle's handling without making any mechanical changes. The focus is on optimizing the torque distribution to the wheels.
The use of torque vectoring in vehicle development makes it possible to increase vehicle safety and achieve a wider range of driving characteristics. The same platform can be used to achieve a wide range of driving characteristics, from direct to indirect, or from comfortable to sporty. Whether the vehicle oversteers, understeers or behaves neutrally can be easily adjusted.
How does data acquisition technology help with the implementation of torque vectoring?
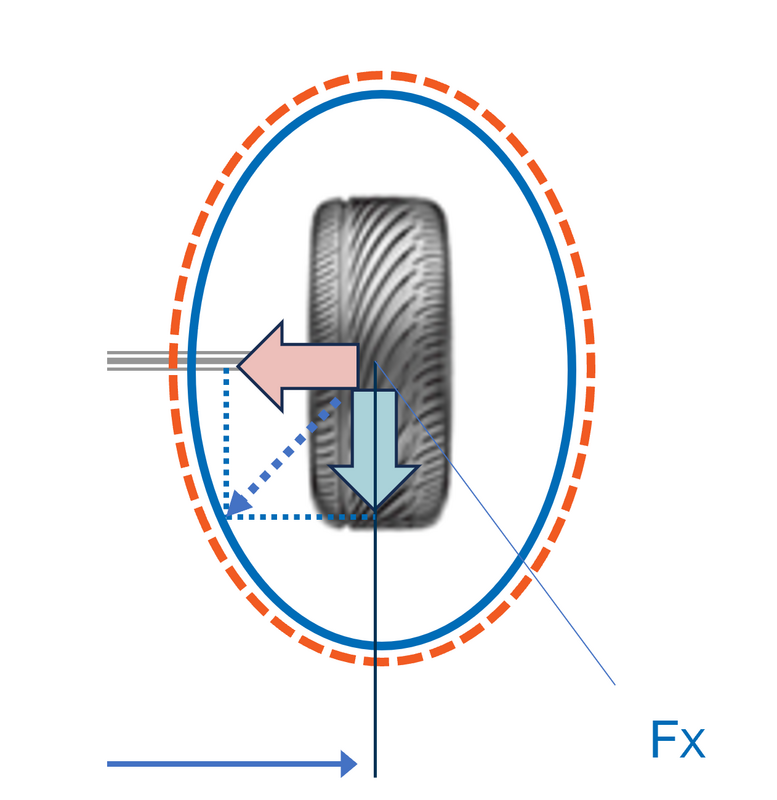
On electric vehicles, these parameters are measured individually on each wheel using wheel force transducers. These WTFs record forces in the x, y, and z directions as well as moments about these axes. Angles and wheel speed at each individual wheel are also relevant for investigating driving behavior. Using additional sensors, the speed vectors of the individual wheels and the vehicle can be recorded synchronously. In this way, the force vectors and torques can be evaluated together with the velocity vectors, allowing conclusions to be drawn about the coefficients of friction.
The availability of accurate, highly sampled, and synchronized measurement data is essential for the complete acquisition and evaluation of forces and torques. This enables, among other things, the evaluation of the ever-faster control loops of ADAS and AD systems. Subsequent simulations also require increasingly precise and comprehensive input data, a combination of vehicle speeds, angles, accelerations, and angular velocities, as well as vehicle moments and forces measured at the wheel. At the same time, the measurement technology must have minimal impact on the vehicle and be robust to electromagnetic interference (EMC) and environmental influences.
Torque Vectoring in Research and Development
An example of a Torque Vectoring application in R&D is a research project at the German Otto-von-Guericke University Magdeburg in the Department of Mechanical Engineering. Here, an imc WFT was used to evaluate the estimation of the friction coefficient on an all-terrain vehicle. The aim of the project is to realize vehicle dynamics control for a vehicle with electric single drives. This requires very accurate, synchronized measurement data.
Vehicle dynamics tests based on the application of torque vectoring require the acquisition of comprehensive, accurate, and synchronized measurement data to evaluate and tune the vehicle's driving behavior and its control interventions. Wheel measurement data is the basis for further simulations as well as for tests on the test bench. Since mobile tests on the vehicle are expensive and time on the test track is limited, the measurement technology must be robust, simple in design, and safe to operate, i.e., with low training requirements, simple and time-saving handling during installation on the vehicle, and integrated calibration mechanisms are desirable.
Autor: Florian Sailer, Business Development Expert Vehicle Dynamics
Did you like reading this text? Read on for more information about Solutions for Vehicle Testing and Vehicle Dynamics.